-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:shsyykl.com
地 址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1

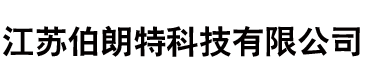
在各种生产实践当中,冲压上下料机器人已经被大量的应用,冲压上下料机器人具有操作方便、高效的特点,提高产品的生产质量及避免工人在生产线上进行长时间的单调繁重的劳动,冲压上下料机械手包含三大主要部件。定制机械手抓取和传送部分,抓取和传送机构又被称为手部和臂部,其中,抓取部分包括夹具与传力机构,工作中起到对工件进行抓取和放置的作用,冲压上下料机械手的传送机构包含直线坐标轴等结构,在实践当中可以用来改变物件的方位以及位置。驱动部分,冲压上下料机械手通过驱动部分产生动力,机械手生产厂家驱动部分也是它的动力源,通常有液压、气压、电力以及机械式驱动四种不同的驱动形式。其中,液压驱动系统是由油缸、阀、油阀和油箱等组成;气压驱动系统是由气缸、气阀、空压机和储气罐等组成;电机驱动系统是由一些电动机组成。控制部分,机械手的控制部分包括程序控制部分、行程检测反馈部分,是冲压上下料机械手的指挥系统,冲压上下料机械手中的每一个程序动作都是由控制部分来指挥执行的,动作的执行顺序、动作的起始位置及时间等,此外,对运行的速度和加速度也能进行控制。

机器人工具更换器的目的,机器人工具更换器通过使机器人能够自动更换末端执行器(例如,夹具,真空杯工具,气动和电动马达,焊枪等),为四轴机器人机器人应用提供灵活性。换刀器包括一个安装在机器人臂上的主板和一个安装在末端执行器上的工具板。换刀器将诸如气动装置,电信号,定制机械手流体等工具从机器人臂传递到末端执行器。使用机器人工具更换器的好处生产线在几秒而不是几小时内更换。快速更换工具进行维护和维修,大大减少停机时间。通过在应用程序中使用多个末端效应器,可以大限度地提高灵活性。通过使用自动交换的单个工具替换重型和大型多工具末端执行器,简化了工具。机械手生产厂家选择合适的机器人工具更换器。选择机器人工具更换器时需要注意的一个关键特性是可靠且可重复的锁定机构,用于将主板锁定到工具板上。要考虑的另一个非常重要的特征是故障安全机构(好是不使用弹簧的机构),以确保在气压或功率损失的情况下工具保持与主机连接。换刀器的有效载荷等级与末端执行器的重量和六轴机器人的有效载荷能力进行比较。仅根据有效载荷选择换刀器将提供一个起点,但重要的因素是力矩容量。
在国外很多的国家工业机器人的使用比国内要普及的多,最早的机器人取代了不受人们欢迎的工作。机器人接管了危险的手动工作和繁琐的工作,如在制造和施工中操作重型机械或在实验室中处理危险化学品。很多的机器人在很大程度上可以做到独立运作,在未来机器人将会与人类合作。定制机械手工业机器人的保障措施是确保机器人和工作人员的安全,如何确保快速移动的机器人不会因为过多的力量撞击或是伤害到人,这是至关重要的。当人类远程控制机器人是,他们的机械手可以轻松地完成任务。机械手生产厂家快盈IV现在我们可以通过人工手来跟踪和复制人的手指运动。一家国外工厂的工会代表说,由于工业机器人接管了生产线上的一些体力工作,工人们的健康问题已经得到了缓解。在以前,从事这项工作的工人经常患肩颈部问题和腕管综合征。

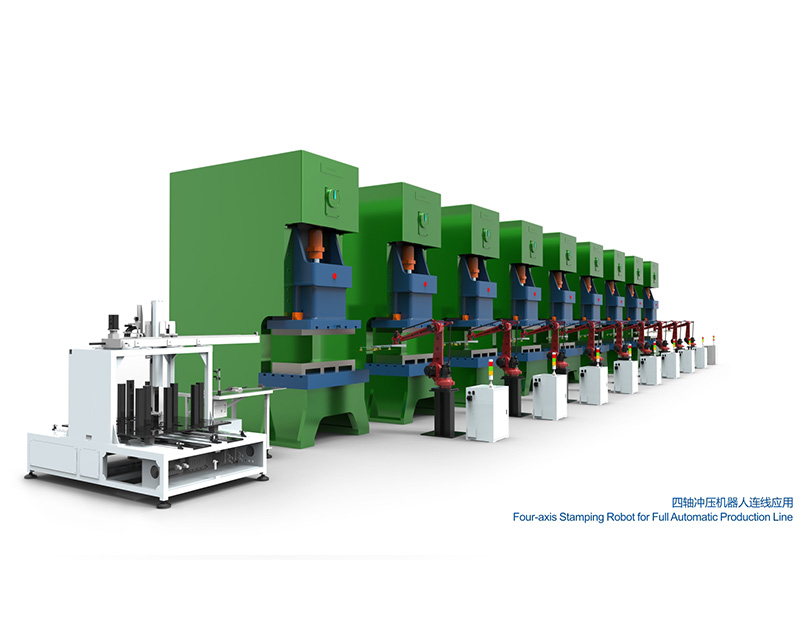
随着自动化技术的不断进步,价格和可访问性使越来越多的公司将机器人应用于其生产,可以理解,这种变化会给感到自己的工作可能被带走的工人带来恐惧;实际上,机器人正在使这些工人摆脱繁琐,乏味,有时甚至是危险的工作,同时使他们前进到更好的机会。定制机械手机器人使工人远离伤害的好的例子之一是机器人焊接。重复的手工焊接对人体极为危险。金属和涂料产生的危险烟雾可能导致严重的疾病。有些产品含有铅或石棉;有些产品含有铅或石棉。暴露会导致肺气肿,肺癌甚至肾衰竭。除烟雾外,手工焊接还会产生大量噪音和强烈的热量。嘈杂的环境会导致听力损失和焊工压力;而热量可能会导致灼伤或热量消耗。焊枪发出的紫外线会引起紫外线性角膜炎,也称为“焊缝”。机械手生产厂家机器人焊接单元具有多项安全功能,以确保工人受到保护。安全栅栏,联锁门开关和光幕使焊接机器人在操作中时,避免人员进入该区域。当工人正在装载零件时,附在定位器上的金属隔板使它们免受电弧眩光和焊枪火花的影响。在具有机器人焊接的设施中,仍需要工人操作,监视和检查机器人及其焊缝。安全是重中之重,工业机器人行家将机器人工作单元与安全功能集成在一起是保持竞争力并在当地创造更多工作的好方法。

六轴机器人功能多,应用范围广阔,更换不同的夹持工具可以应付各种各样的工业生产活动,那么这么高大上的设备,在我们要改造自动化的时候,是不是一定要用六轴的关节机械臂呢定制机械手答案显然是不一定的,除了关节机械臂,还有直角系机械手等多种方式可以选择,有很多性能并不一定能超越其他替代产品,我们暂时只对比和四轴机器人的差距首先,六轴多关节机器人的采购成本会比四轴机器人高,如果未来相当一段时间产品较为稳定,完全可以能省则省其次,既然是六轴,那么要经过控制器运算处理的数据会比四轴多机械手生产厂家,因为反应速度比不过四轴再次,各个关节之间相互咬合,经过系统镭射补偿也会有一定的重复精度误差,轴数越多,相对的重复定位精度会偏大一些最后,使用难度不一样,六轴的机器人操作系统会高级,涉及的参数较多,需要考虑的因素更多一些,对操作员的要求和细心都有较高要求。
对于自动化行业的资深的机、电工程师来说,选择合适的“机器人”也许是一个简单的工作。但是对于那些第—次准备购买、导入机器人的设计人员或工厂来说,也许会有些迷茫。今天领拓就带您了解一下如何选择一个合适的工业机器人。定制机械手首先需要评估导入的机器人是用于怎样的应用场合以及什么样的制程。若是应用制程需要在人工旁边由机器协同完成,对于通常的人机混合的半自动线,特别是需要经常变换工位或移位移线的情况,以及配合新型力矩感应器的场合,协作型机器人(Cobots)应该是一个很好的选项。如果是寻找一个紧凑型的取放(Pick& Place)料机器人,你可能想选择一个水平关节型机器人(Scara)。如果是寻找针对小型物件,快速取放的场合,并联机器人(Delta)就适合这样的需求。机械手生产厂家接下来的讨论,我们将针对垂直关节多轴机器人(Multi-axis)。这种机器人可以适应一个非常大范围的应用。从取、放料到码垛,以及喷涂,去毛刺,焊接等专用制程。现在,工业机器人制造商基本上针对每一种应用制程都有相应的机器人方案。你所做的只需要明确你希望机器人为你做哪个工作,以及从不同的种类当中,选择适合的型号。如果你希望机器人完成将目标工件从一个工位搬运到另一个工位,需要注意将工件的重量以及机器人手爪的重量加总到其工作负荷。


 地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1
地址:江苏省无锡市锡山区羊尖镇羊港路95号锡东创星港7#1-1 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com