-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:shsyykl.com
地 址:江苏省无锡市锡山区羊尖镇锡沪路328号

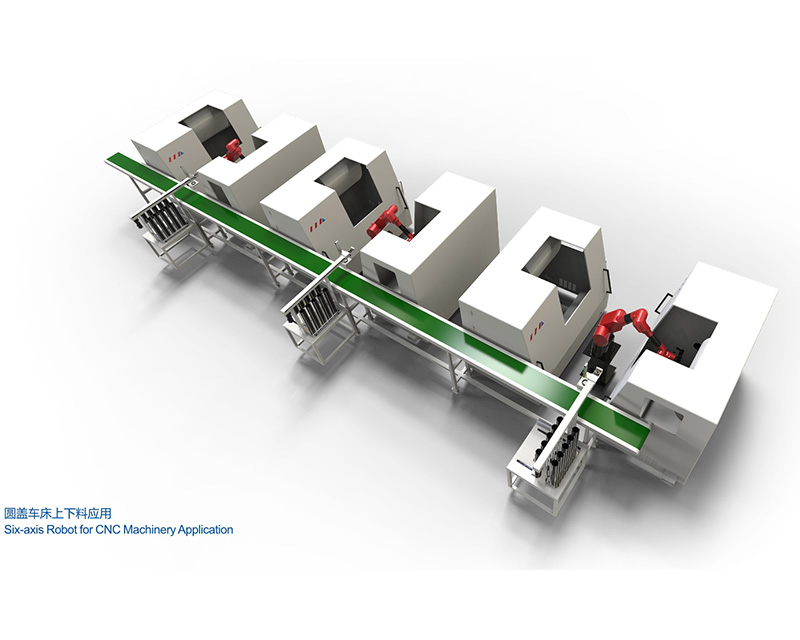
六轴机器人工具快换装置的优点,领航机器人推荐在六轴机器人末端上使用,进行规则的圆盘类或棒料类的小型零件的自动化加工,特别适合于加工节拍短,生产批量大的场合。定制注塑输送带流水线一、六轴机器人工具快换装置的优点1.生产线更换可以在数秒内完成;2.维护和修理工具可以快速更换,大大降低停工时间;3.通过在应用中使用1个以上的末端执行器,从而使柔性增加;4.使用自动交换单一功能的末端执行器,代替原有笨重复杂的多功能工装执行器。六轴机器人工具快换装置的优点,数控机床机器人工具快换装置,使单个机器人能够在制造和装备过程中交换使用不同的末端执行器增加柔性,被广泛应用于自动点焊、弧焊、材料抓举、冲压、检测、卷边、装配、材料去除、毛刺清理、包装等操作。注塑输送带流水线厂快盈IV另外,工具快换装置在一些重要的应用中能够为工具提供备份工具,有效避免意外事件。相对人工需数小时更换工具,工具快换装置自动更换备用工具能够在数秒钟内就完成。同时,该装置还被广泛应用在一些非机器人领域,包括托台系统、柔性夹具、人工点焊和人工材料抓举。

在电子技术和计算机技术的推动下,机器人已在工业界变得相当普遍。 其中,使用焊接机器人和搬运机器人。定制注塑输送带流水线除了功能之外,焊接机器人和搬运机器人之间还有什么区别? 焊接机器人是从事焊接工作的工业机器人。 它可以通过编程自动控制。 焊接机器人主要包括两部分:机器人和焊接设备。 焊接设备是实现焊接过程所需的设备,包括焊接机和焊接过程设备。 以及助焊剂等。焊接机器人的焊接设备大多采用气体保护焊方法进行焊接。 由于机器人控制柜是数字控制的,焊接电源主要是模拟控制,因此有必要在焊接电源和控制柜之间增加一个接口。当焊接机器人处于工作状态时,电弧时间占很大比例。注塑输送带流水线厂 因此,在选择焊接电源时,一般应根据连续率为100%确定电源的容量。 通常,我们会将焊接设备连接到机器人的上臂,这将有助于保持焊丝的稳定性。 搬运机器人是实现自动搬运的工业机器人。它已成为现代机械制造生产系统的重要组成部分。 它的优势是可以通过编程来完成各种预期的任务,这是非常准确的。 可以在搬运机器人中安装不同的末端执行器,以完成各种形状和状态的工件搬运工作,不仅大大减少了人类的繁重劳动,而且大大提高了工作效率。

码垛机器人的技术保养是指:为了使机械经常处于良好的技术状态,保证其可靠性,提高工作效率,延长使用寿命而对机械所采取的一系列技术措施。其主要内容是以清洁、紧固、润滑和调整为主,并结合相关的检查和检测工作。各类型的机械设备在“使用和保养手册”中都有明确的保养规定。定制注塑输送带流水线1、码垛机的润滑零部件特别多,同时不同的部件所添加的油品也不同,要根据使用说明书,进行添加润滑油。如:齿轮齿条,导轨滑块,大小齿轮,气缸,升降系统,等等,都是需要进行加润滑油的部件。2、检查升降机,检查油质和油位。因为升降机主要就是依靠液压油来进行升降,所以要密切检查,同时在检查时禁止交叉作业,防止意外的发生。3、检查主轴系统,对齿轮齿条,导轨滑块,气缸等部位进行检查,是不是有异响,是不是该润滑。如果有松动的地方,要进行紧固。注塑输送带流水线厂4、检查输送机。输送机传送动力不足时要进行维修,发现链接部位有松动,也要进行紧固。5、检查旋转平台系统。看一下减速机是否有异常,齿轮是否有磨损,发现有磨损的地方,要及时更换。
工业机器人是如何识别物体进行抓取任务的呢?从机器视觉的角度,由简入繁从相机标定,平面物体检测、有纹理物体、无纹理物体、深度学习、与任务/运动规划结合等6个方面深度解析文章的标题。首先,我们要了解,机器人领域的视觉(Machine Vision)跟计算机领域(Computer Vision)的视觉有一些不同:机器视觉的目的是给机器人提供操作物体的信息。所以,机器视觉的研究大概有这几块:1. 物体识别(Object Recognition):在图像中检测到物体类型等,这跟 CV 的研究有很大一部分交叉;定制注塑输送带流水线2. 位姿估计(Pose Estimation):计算出物体在摄像机坐标系下的位置和姿态,对于机器人而言,需要抓取东西,不仅要知道这是什么,也需要知道它具体在哪里;3. 相机标定(Camera Calibration):注塑输送带流水线厂快盈IV因为上面做的只是计算了物体在相机坐标系下的坐标,我们还需要确定相机跟机器人的相对位置和姿态,这样才可以将物体位姿转换到机器人位姿当然,我这里主要是在物体抓取领域的机器视觉;SLAM 等其他领域的就先不讲了。由于视觉是机器人感知的一块很重要内容,所以研究也非常多了,我就我了解的一些,按照由简入繁的顺序介绍吧:

(1)机器人与信息技术深入融合定制注塑输送带流水线大数据和云存储技术使得机器人逐步成为物联网的终端和节点。信息技术的快速发展将工业机器人与网络融合,组成复杂性强的生产系统,各种算法如蚁群算法、免疫算法等可以逐步应用于机器人应用中,使其具有类人的学习能力,多台机器人协同技术使一套生产解决方案成为可能。(2)机器人产品易用性与稳定性提升随着机器人标准化结构、集成一体化关节、自组装与自修复等技术的改善,机器人的易用性与稳定性不断被提高。一是机器人的应用领域已经从较为成熟的汽车、注塑输送带流水线厂快盈IV电子产业延展至食品、、化工等更广泛的制造领域,服务领域和服务对象不断增加,机器人本体向体积小、应用广的特点发展。二是机器人成本快速下降。和工艺日趋成熟,机器人初期投资相较于传统专用设备的价格差距缩小,在个性化程度高、工艺和流程繁琐的产品制造中替代传统专用设备具有更高的经济效率。


 地址:江苏省无锡市锡山区羊尖镇锡沪路328号
地址:江苏省无锡市锡山区羊尖镇锡沪路328号 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com