-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:shsyykl.com
地 址:江苏省无锡市锡山区羊尖镇锡沪路328号

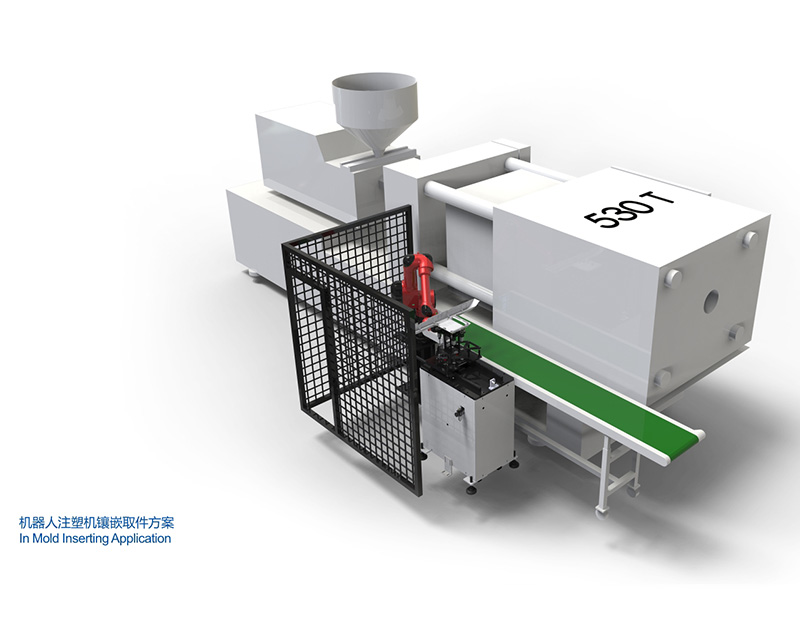
搬运机械手在工业生产中到底有什么样的作用呢?在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,优质机器手都要用到机械手来完成工件的取放。对机械手的控制主要是位置识别、运动方向控制和物料是否存在的判别。其任务是将传送带A上的工件或物品搬运到传送带B上。机械手的上升、下移、左移、右移抓紧和放松都是用双线圈三位电磁阀气动缸完成。当某个电磁阀通电时,就保持相对应的动作,即使线圈再断电仍然保持,直到相反方向的线圈通电,相对应的动作才结束。机器手厂快盈IV设备上装有上、下、左、右、抓紧、放松六个限位开关,控制对应工步的结束。传送带上设有一个光点开关,监视工件到位与否。机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。机械手一般由执行机构、驱动系统、控制系统及检测装置三大部分组成,智能机械手还具有感觉系统和智能系统。

从太空机器人到医疗领域可见的手术机器人,机械臂都不可或缺,占据着重要地位。那么,不同机械臂是如何实现控制抓取呢?它与自由度有什么关系吗?优质机器手据悉,太空机械臂,实现类似人手臂的功能。融合了机械、电子、控制及信息等多学科技术,是一个机、电、热、控一体化的高度集中的空间机电系统。通过搭载火箭,它能执行空间碎片清理、在轨加注与维修等空间任务。图中为国产太空机械臂模型,我国已研制出空间机械臂,由一个臂展和6个关节组成,非常灵活,可以全方位进行目标捕获和操作。机器手厂事实上,机械臂已有70多年历史,诞生于20世纪40年代,目前主要应用在航天、喷漆、弧焊、医疗等。从“遨龙一号”到医疗领域可见的手术机器人,机械臂都不可或缺,占据着重要地位。那么,不同机械臂是如何实现控制抓取呢?它与自由度有什么关系吗?
工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的工业机器人还有行走机构。优质机器手大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。工业机器人按程序输入方式区分有编程输入型和示教输入型两类。编程输入型是将计算机上已编好的作业程序文件,机器手厂通过RS232串口或者以太网等通信方式传送到工业机器人控制柜。示教输入型的示教方法有两种:一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。

一种:吸上式使用安置在自动喷涂机器人喷枪下部的铝制小涂料罐,靠喷枪喷嘴喷出的空气流,在喷嘴部位产生低压而吸引漆料。漆料的供给量受漆料粘度和密度的影响较大,而且与喷嘴口径的大小有关。涂料罐的容量一般在1L以下。优质机器手常用用于批量生产的、涂料用量少的喷涂作业,一般用于中低粘度的涂料的喷涂。第二种:压送式供漆是依靠压缩空气或压力泵将漆液加压后输送到喷具。压送式供漆能提供漆液以较高的压力和较大的流量,可以实现高粘度涂料的远距离输送及中大规模的集中输送。循环供漆系统的压送式集中供气系统中最重要的一种涂装供漆系统。第三种:重力式使用安置在自动喷涂机器人喷枪上部的涂料杯或将涂料容器安置在一定的高度上,靠涂料自身重量向喷枪供漆,机器手厂快盈IV靠涂料容器的吊挂高度来调节输漆量。为减轻重力式喷枪上涂料杯子的重量,一般采用铝制品,其容量一般为0.15-0.5L。重力式供漆常用语中低粘度的涂料的自动喷涂。在自动喷涂机器人喷枪上部的涂料杯内,通过压缩空气加压时,也可以喷涂高粘度的涂料。


 地址:江苏省无锡市锡山区羊尖镇锡沪路328号
地址:江苏省无锡市锡山区羊尖镇锡沪路328号 电话:13826981732/18617216508
电话:13826981732/18617216508 快盈IV 邮箱:xinbolangte@163.com
快盈IV 邮箱:xinbolangte@163.com