-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:shsyykl.com
地 址:江苏省无锡市锡山区羊尖镇锡沪路328号
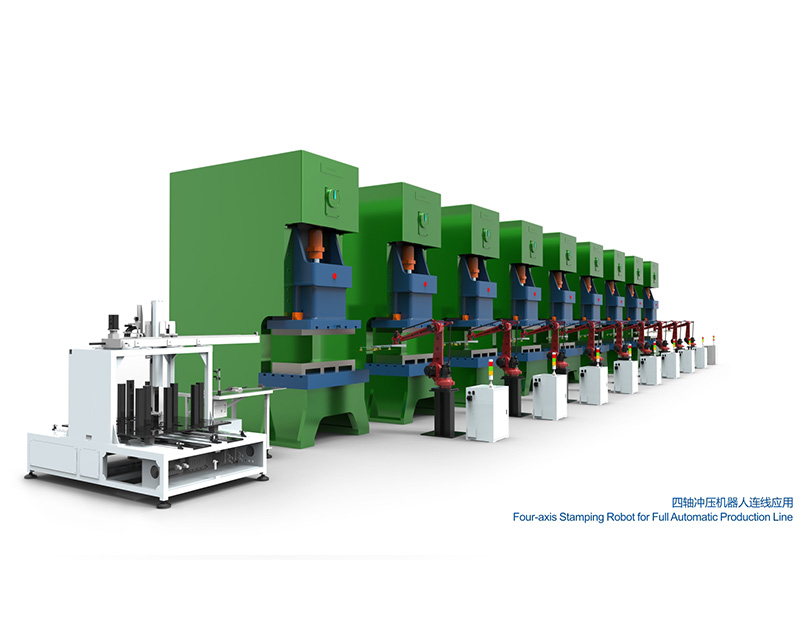
常见冲床机械手是工业生产中常用的进行水平/ 垂直位移的机械设备,它的动作由气缸驱动,气缸又由相应的四轴机器人电磁阀控制。下面介绍下冲床机械手的组成部分和运动情况。冲床机械手主要由起固定支撑作用的机架、供应全伺服机械手机械臂和气爪三部分组成。驱动第一肩关节的运动有2根气动肌肉组成,机架臂有4根气动肌肉组成,大臂上安装有4根气动肌肉,小臂上安装有4根气动肌肉。v的分类;1.按驱动方式可分为液压式、气动式、电动式、机械式机械手;2.按适用范围可分为专用机械手和通用机械手两种;全伺服机械手厂3.按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。冲床机械手能够实现4个自由度的运动,其各自的自由度的驱动全部由气动肌肉来实现。最前端的气爪抓取物品,通过气动肌肉的驱动六轴机器人实现各自关节的转动,使物品在空间上运动,根据合理的控制,最终实现机械手的动作要求。 而冲压机械手的动作过程如下:从原点开始按下启动按钮时,下降电磁阀通电,机械手开始下降。

在电子技术和计算机技术的推动下,机器人已在工业界变得相当普遍。 其中,使用焊接机器人和搬运机器人。供应全伺服机械手除了功能之外,焊接机器人和搬运机器人之间还有什么区别? 焊接机器人是从事焊接工作的工业机器人。 它可以通过编程自动控制。 焊接机器人主要包括两部分:机器人和焊接设备。 焊接设备是实现焊接过程所需的设备,包括焊接机和焊接过程设备。 以及助焊剂等。焊接机器人的焊接设备大多采用气体保护焊方法进行焊接。 由于机器人控制柜是数字控制的,焊接电源主要是模拟控制,因此有必要在焊接电源和控制柜之间增加一个接口。当焊接机器人处于工作状态时,电弧时间占很大比例。全伺服机械手厂 因此,在选择焊接电源时,一般应根据连续率为100%确定电源的容量。 通常,我们会将焊接设备连接到机器人的上臂,这将有助于保持焊丝的稳定性。 搬运机器人是实现自动搬运的工业机器人。它已成为现代机械制造生产系统的重要组成部分。 它的优势是可以通过编程来完成各种预期的任务,这是非常准确的。 可以在搬运机器人中安装不同的末端执行器,以完成各种形状和状态的工件搬运工作,不仅大大减少了人类的繁重劳动,而且大大提高了工作效率。

随着社会不断的发展,在很多工业中,焊接工作是比较常见的,我们为了避免工作焊接过程中不良的脱焊或假焊现象,我们所能做的就是尽早采取预防措施,减少脱焊或假焊的可能性。那么工业焊接机器人如何减少脱焊或假焊的呢。全伺服机械手厂工业焊接机器人工作前,首先必须检查电压和电流,以确保机器的额定功率不得过高或过低。然而,焊接肯定会产生影响,只有在正常条件下使用,才能保证效果。其次,要注意焊接机器人的参数设置,供应全伺服机械手需要结合不同工件、不同厚度等因素进行设置。特别是焊接机器人的焊接速度不要太快,否则焊接质量不可避免地会受到影响,当然也不要太慢,这不仅会降低工作效率,还可能会导致焊接部位产生较大的疤痕,因此应确保焊接速度均匀。事实上,在焊接机器人的参数设置好之后,可以首先进行测试,并且焊接机器人只有在通过测试之后才能投入生产。此外,工件问题不容忽视。加工前需要清洗工件,以避免表面污渍影响焊接机器人的焊接效果。如果焊接机器人本身出现故障,该怎么办?首先,检查电气控制箱的内部状况,确保其干燥。如果发现水或油进入,不要启动机器。二是检查电压,在额定条件下应保证电压。

码垛机器人:供应全伺服机械手码垛机器人是从事码垛的工业机器人,将已装入容器的物体,按一定排列码放在托盘、栈板(木质、塑胶)上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存。搬运机器人:搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,把人们从繁重的体力劳动中解放出来。全伺服机械手厂快盈IV焊接机器人:现在机器人能很轻松的完成两类性质的焊接作业,即点焊和弧焊。由于要连在一起的金属部件形状可能很不规则,常常要求有一只灵活的机械手腕。弧焊机器人主要应用于各类汽车零部件的焊接生产,主要有熔化极焊接作业和非熔化极焊接作业两种类型。


 地址:江苏省无锡市锡山区羊尖镇锡沪路328号
地址:江苏省无锡市锡山区羊尖镇锡沪路328号 电话:13826981732/18617216508
电话:13826981732/18617216508 邮箱:xinbolangte@163.com
邮箱:xinbolangte@163.com