-

厂家直销
-

品质保障
-

售后无忧
-

支持定制
-

多年经验

联系人:刘鸿 刘锋
电 话:0510-88220105
传 真:0510-88220105
手 机:18617216508/13826981732
邮 箱:xinbolangte@163.com
网 址:shsyykl.com
地 址:江苏省无锡市锡山区羊尖镇锡沪路328号

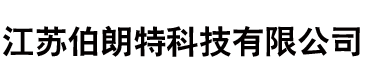
对于自动化行业的资深的机、电工程师来说,选择合适的“机器人”也许是一个简单的工作。但是对于那些第—次准备购买、导入机器人的设计人员或工厂来说,也许会有些迷茫。今天领拓就带您了解一下如何选择一个合适的工业机器人。定制四轴冲压机器人首先需要评估导入的机器人是用于怎样的应用场合以及什么样的制程。若是应用制程需要在人工旁边由机器协同完成,对于通常的人机混合的半自动线,特别是需要经常变换工位或移位移线的情况,以及配合新型力矩感应器的场合,协作型机器人(Cobots)应该是一个很好的选项。如果是寻找一个紧凑型的取放(Pick& Place)料机器人,你可能想选择一个水平关节型机器人(Scara)。如果是寻找针对小型物件,快速取放的场合,并联机器人(Delta)就适合这样的需求。四轴冲压机器人价格快盈IV接下来的讨论,我们将针对垂直关节多轴机器人(Multi-axis)。这种机器人可以适应一个非常大范围的应用。从取、放料到码垛,以及喷涂,去毛刺,焊接等专用制程。现在,工业机器人制造商基本上针对每一种应用制程都有相应的机器人方案。你所做的只需要明确你希望机器人为你做哪个工作,以及从不同的种类当中,选择适合的型号。如果你希望机器人完成将目标工件从一个工位搬运到另一个工位,需要注意将工件的重量以及机器人手爪的重量加总到其工作负荷。
现在用的最多的工业机器人,一般都是六轴的,但是推出的人机协作机械臂,却有7个自由度,一直想不明白为什么。定制四轴冲压机器人直到最近看到知乎上的一个问题:人的手臂(腕关节到肩关节)有几个自由度?才发现,原来7个自由度是对人手臂的真实还原。人的手臂(腕关节到肩关节)有几个自由度?我想绝大部分人都没有想过,更别说去了解有哪几个自由度,即使是学工科的人,也未必能解释清楚。没想到知乎上居然有人把这个问题回答的这么专业有内涵,同时又那么有哲理,忍不住想要把这个答案分享一下。四轴冲压机器人价格快盈IV回答这个问题的是知乎网友杨硕,答案如下:实话说,我对robot manipulation还是挺熟的,但是楼上几个答案一眼看去都看不懂。不是黑,而是觉得对非专业人士来说不好理解。我来尽量用通俗的语言解释一下。首先,问题的答案是:数一下就行了啊!

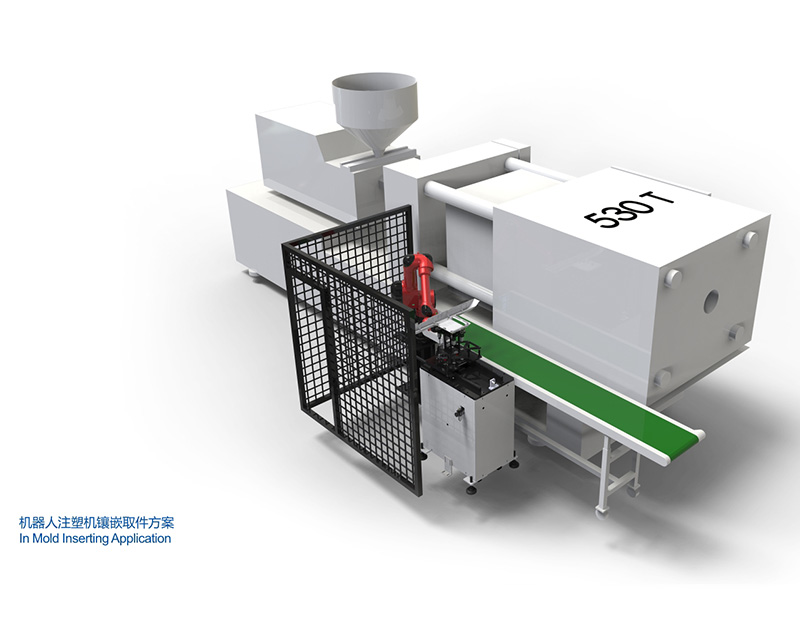
搬运机械手在工业生产中到底有什么样的作用呢?在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,定制四轴冲压机器人都要用到机械手来完成工件的取放。对机械手的控制主要是位置识别、运动方向控制和物料是否存在的判别。其任务是将传送带A上的工件或物品搬运到传送带B上。机械手的上升、下移、左移、右移抓紧和放松都是用双线圈三位电磁阀气动缸完成。当某个电磁阀通电时,就保持相对应的动作,即使线圈再断电仍然保持,直到相反方向的线圈通电,相对应的动作才结束。四轴冲压机器人价格设备上装有上、下、左、右、抓紧、放松六个限位开关,控制对应工步的结束。传送带上设有一个光点开关,监视工件到位与否。机械手是模仿人的手部动作,按给定程序、轨迹和要求实现自动抓取、搬运和操作的自动装置。它特别是在高温、高压、多粉尘、易燃、易爆、放射性等恶劣环境中,以及笨重、单调、频繁的操作中代替人作业,因此获得日益广泛的应用。机械手一般由执行机构、驱动系统、控制系统及检测装置三大部分组成,智能机械手还具有感觉系统和智能系统。
在诸多焊接方式中,由于点焊只需点位控制,至于焊钳在点与点之间的移动轨迹没有严格要求,因此点焊对所用的机器人的要求是不很高的,这也点焊机器人较早被应用的原因之一。定制四轴冲压机器人但为了确保焊接质量,基本的要求还是要满足的,比如说点焊机器人不仅要有足够的负载能力,而且在点与点之间移位时速度要快捷,动作要平稳,定位要准确,以减少移位的时间,提高工作效率。在实际焊接过程中点焊机器人需要有多大的负载能力,主要取决于所用的焊钳形式,对于用与变压器分离的焊钳,30~45kg负载的机器人就足够了。但是这种焊钳一方面由于二次电缆线长,电能损耗大,也不利于机器人将焊钳伸入工件内部焊接;另一方面电缆线随机器人运动而不停摆动,电缆的损坏较快。四轴冲压机器人价格因此一体式焊钳逐渐将其代替。考虑到点焊机器人要有足够的负载能力,才能以较大的加速度将焊钳送到空间位置进行焊接,一般都选用100~150kg负载的重型机器人。为了适应连续点焊时焊钳短距离快速移位的要求,有些重型机器人增加了可在0.3s内完成50mm位移的功能,而这也对电机的性能,微机的运算速度和算法都提出更高的要求。

从太空机器人到医疗领域可见的手术机器人,机械臂都不可或缺,占据着重要地位。那么,不同机械臂是如何实现控制抓取呢?它与自由度有什么关系吗?定制四轴冲压机器人据悉,太空机械臂,实现类似人手臂的功能。融合了机械、电子、控制及信息等多学科技术,是一个机、电、热、控一体化的高度集中的空间机电系统。通过搭载火箭,它能执行空间碎片清理、在轨加注与维修等空间任务。图中为国产太空机械臂模型,我国已研制出空间机械臂,由一个臂展和6个关节组成,非常灵活,可以全方位进行目标捕获和操作。四轴冲压机器人价格事实上,机械臂已有70多年历史,诞生于20世纪40年代,目前主要应用在航天、喷漆、弧焊、医疗等。从“遨龙一号”到医疗领域可见的手术机器人,机械臂都不可或缺,占据着重要地位。那么,不同机械臂是如何实现控制抓取呢?它与自由度有什么关系吗?


 快盈IV 地址:江苏省无锡市锡山区羊尖镇锡沪路328号
快盈IV 地址:江苏省无锡市锡山区羊尖镇锡沪路328号 快盈IV 电话:13826981732/18617216508
快盈IV 电话:13826981732/18617216508 快盈IV 邮箱:xinbolangte@163.com
快盈IV 邮箱:xinbolangte@163.com